Szabályozástechnika - LaborZH, 2010. 05. 05., megoldással
{kind=link}
Tartalomjegyzék
- 1 1. Adott az alábbi szabályozási kör:
- 2 2. Adott az alábbi folytonos folyamat:
- 3 3. Egy mintavételes szabályozási körben a szakasz átviteli függvénye:
- 3.1 a./ Zérusrendű tartószerv esetén adja meg a szakasz G(z) impulzusátviteli függvényét zérus-pólus alakban. (3 pont)
- 3.2 b./ Soros PID kompenzációt alkalmazzunk póluskiejtéssel. Adja meg a szabályozó impulzus átviteli függvényét zérus-pólus alakban. A szabályozó arányos szorzótényezője legyen egy. (2 pont)
- 3.3 c./ Stabilis-e a diszkrét zárt szabályozási rendszer? Válaszát indokolja! (2 pont)
- 4 4.
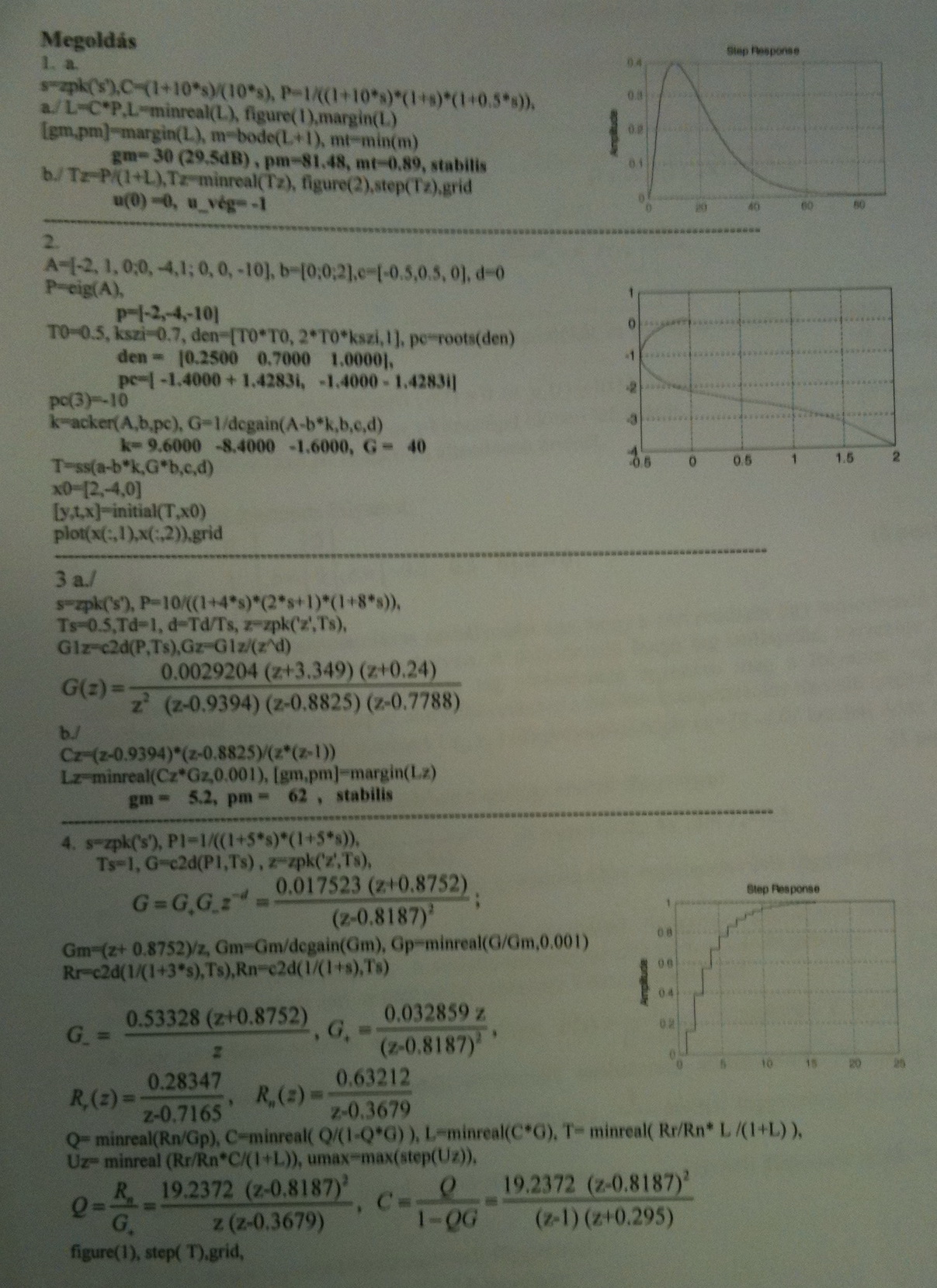
- 5 Megoldás
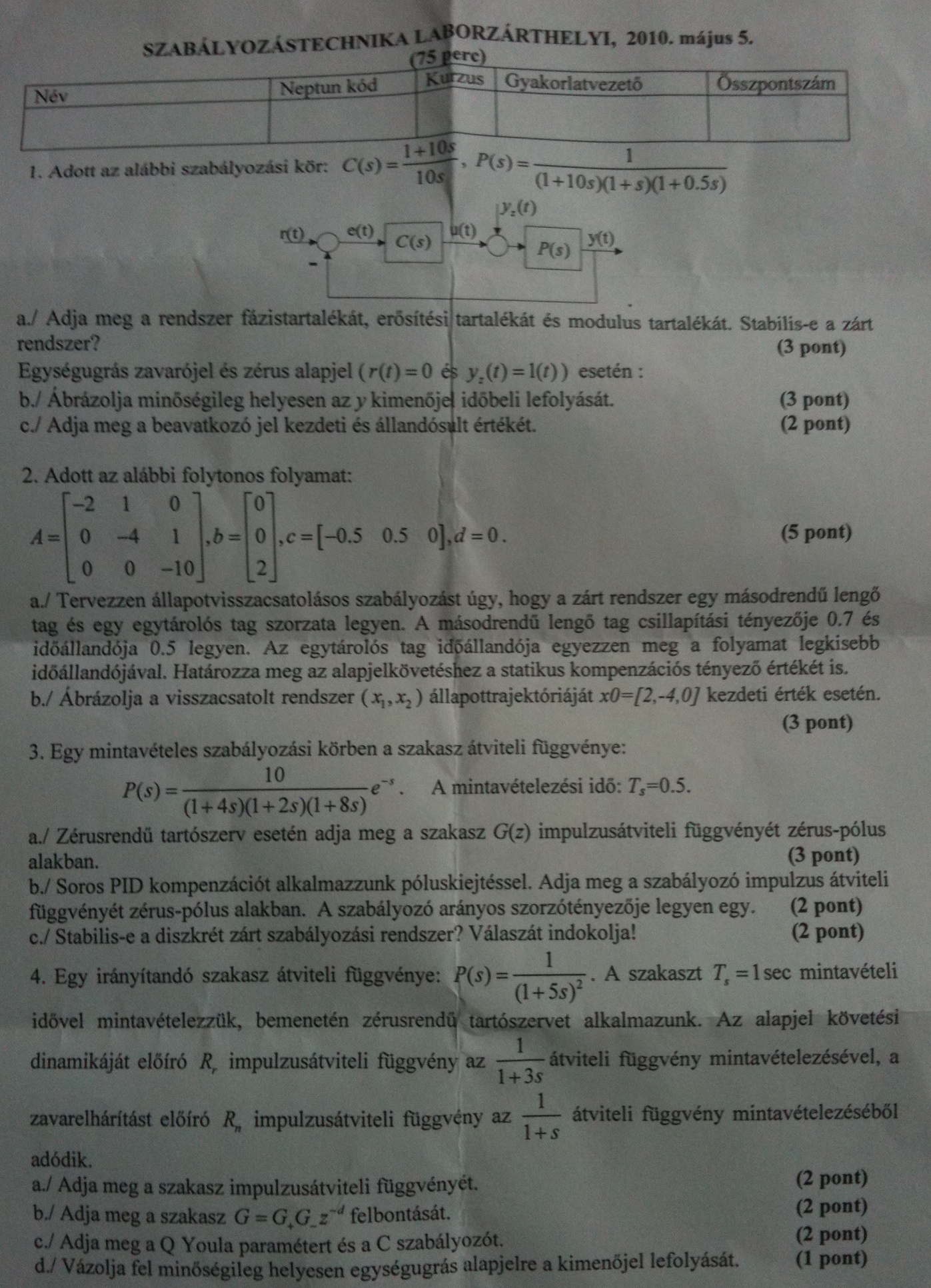
1. Adott az alábbi szabályozási kör:
[math]C(s)=\frac{1+10s}{10s} P(s)=\frac{1}{(1+10s)(1+s)(1+0.5s)} [/math]

a./ Adja meg a rendszer fázistartalékát, erősítési rendszer tartalékát és modulus tartalékát Stabilis-e a zárt rendszer? (3 pont)
Egységugrás zavarójel és zérus alapjel ( [math]r(t)=0[/math] és [math]y_z(t)=1(t)[/math] ) esetén:
b./ Ábrázolja minőségileg helyesen az y kimenője időbeli lefolyását. (3 pont)
c./ Adja meg a beavatkozó jel kezdeti és állandósult értékét. (2 pont)
2. Adott az alábbi folytonos folyamat:
[math]A=\left[ \begin{array}{rrr}
-2 & 1 & 0 \\
0 & -4 & 1 \\
0 & 0 & -10 \end{array} \right] [/math],
[math]b=\left[ \begin{array}{r} 0 \\ 0 \\ 2 \end{array} \right] [/math], [math]c=\left[ \begin{array}{rrr} -0.5 & 0.5 & 0 \end{array} \right] [/math], [math]d=0[/math]
a./
Tervezzen állapotvisszacsatolásos szabályozást úgy, hogy a zárt rendszer egy másodrendű lengő tag és egy egytárolós tag szorzata legyen. A másodrendű lengő tag csillapítási tényezője 0.7 és időállandója 0.5 legyen. Az egytárolós tag időállandója egyezzen meg a folyamat legkisebb időállandójával. Határozza meg az alapjelkövetéshez a statikus kompenzációs tényező értékét is. (5 pont)
b./
Ábrázolja a visszacsatolt rendszer [math](x_1, x_2)[/math] állapottrajektóriáját [math]x0=[2,-4,0][/math] kezdeti érték esetén. (3 pont)
3. Egy mintavételes szabályozási körben a szakasz átviteli függvénye:
[math]P(s)=\frac{10}{(1+4s)(1+2s)(1+8s)}\mathrm{e}^{-s}[/math]. A mintavételezési idő: [math]T_s=0.5[/math].
a./ Zérusrendű tartószerv esetén adja meg a szakasz G(z) impulzusátviteli függvényét zérus-pólus alakban. (3 pont)
b./ Soros PID kompenzációt alkalmazzunk póluskiejtéssel. Adja meg a szabályozó impulzus átviteli függvényét zérus-pólus alakban. A szabályozó arányos szorzótényezője legyen egy. (2 pont)
c./ Stabilis-e a diszkrét zárt szabályozási rendszer? Válaszát indokolja! (2 pont)
4.
Egy irányítandó szakasz átviteli függvénye: [math]P(s)=\frac{1}{(1+5s)^2}[/math]. A szakaszt [math]T_s=1[/math] sec mintavételi idővel mintavételezzük, bemenetén zérusrendű tartószervet alkalmazunk. Az alapjel követési dinamikáját előíró [math]R_r[/math] impulzusátviteli függvény az [math]\frac{1}{(1+3s)}[/math] átviteli függvény mintavételezésével, a zavarelhárítást előíró [math]R_n[/math], impulzusátviteli függvény az [math]\frac{1}{(1+s)}[/math] átviteli függvény mintavételezéséből adódik.
{kind=link}