„Beágyazott információs rendszerek - ZH A csoport 2014.04.30” változatai közötti eltérés
Ugrás a navigációhoz
Ugrás a kereséshez
| 76. sor: | 76. sor: | ||
;6. Milyen eszközzel tudunk időt viszonylag pontosan mérni (1 pont)? Hogyan függ az időmérés ponossága az alkalmazott elektronikus számláló tartalmától, ill. az óragenerátor frekvencia pontosságától (1 pont)? Hogyan mérünk kis időtartamokat (2 pont)? | ;6. Milyen eszközzel tudunk időt viszonylag pontosan mérni (1 pont)? Hogyan függ az időmérés ponossága az alkalmazott elektronikus számláló tartalmától, ill. az óragenerátor frekvencia pontosságától (1 pont)? Hogyan mérünk kis időtartamokat (2 pont)? | ||
| − | + | : A kísérő szövegeket nem sikerült leírni, de ezt az ábrát várja | |
[[File:BIR_zh_20140430_A_6_1.png|200px]] | [[File:BIR_zh_20140430_A_6_1.png|200px]] | ||
A lap 2014. május 10., 08:58-kori változata
- 1. Egy preemptív, prioritásos, több taszkos rendszert az alábbi táblázat jellemzi. A prioritás a taszkok sorrendjében csökken
| Taszk | T | C | D |
|---|---|---|---|
| I1 | 10 ms | 0.50 ms | 3 ms |
| T1 | 3 ms | 0.50 ms | 3 ms |
| T2 | 6 ms | 0.75 ms | 6 ms |
| T3 | 14 ms | 1.25 ms | 14 ms |
| T4 | 50 ms | 5.00 ms | 30 ms |
- Határozza meg a T3-as tasz worst-case válaszidejét (4 pont)! Maximálisan mekkora lehet az a blokkolási idő, amivel T4 blokkolja a T3-at (2 pont)?
- [math]R_i = C_i + \sum \left \lceil \frac{R_i}{T_k} \right \rceil C_k[/math] képlet alapján kell kitölteni az alábbi táblázatot (A [math]I_i[/math] a középső szummás rész a képletből)
| [math]R_{i}^{n}[/math] | [math]I_i[/math] | [math]R_{i}^{n+1}[/math] |
|---|---|---|
| 0 | 0 | 1,25 |
| 1,25 | 1,75 | 3 |
| 3 | 1,75 | 3 |
- Blokkolás: nincs köze a prioritásos rendszerhez
- [math]C_i[/math] értéke legyen 1,25 helyett 1,25 + 5,0 = 6,25
- Ha így is belefér a 14ms-es határba, az egész lehet blokkolási idő. (Innentől ugyanúgy megoldható, mint az előző feladatrész)
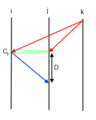
- 2. Egy vezetéknélküli hálózatban a j jelű csomópont óráját az i jelű órához szinkronizáljuk. "Referencia broadcasting" eljárást használunk a k jelű órára alapozva. A kommunikáció jittere 10 msec. A referencia jel érkezésének bizonytalansága egy konkrét üzenet továbbítása esetén 1 msec, azaz a referencia jel leghamarabbi és legkésőbbi vétele között ennyi idő telhet el. Határozza meg a szinkronizáció worst-case bizonytalanságának (pluszminusz) értékét, ha a j-edik csomópont által vett időbélyegek különbsége 100 msec (3 pont)! Határozza meg ugyanezt a bizonytalanságot abban az esetben is, amikor kétirányú (round trip) szinkronizációt használunk, és a j-edik csomópont által rögzített időbélyegek különbsége 200 msec (3 pont)!
- Mindenképp le kell rajzolni az alábbi ábrát. A keresett megoldásunk [math]\pm[/math] 1 msec, mert az i-hez és j-hez érkező üzenet ekkora különbséggel tud megérkezni.
- Kétriányú esetben a worst-case lehetőség, amikor [math]D = d_{max} + d_{min}[/math] vagy [math]D = d_{min} + d_{max}[/math]. Az ideális esethet képest pont a jitter fele lesz a hiba, azaz [math]\pm[/math] 5 msec.
Referencia broadcasting
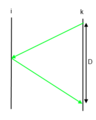
Ideális eset kéritányú esetén

Worst-case eset kétirányú esetén



- 3. Egy beágyazott rendszer négy csomópont közül az egyik bizánci viselkedésű ("hazudós"). Jó lenne az órákat szinkronizálni. A nem "hazudós" csomópontok milyen algoritmussal tudják eldönteni, hogy melyik csomópont óra-információját kell figyelmen kívül hagyni (4 pont)? (Részletezze az algoritmust! A feladat megoldása során feltételezheti, hogy a komunikációs csatornák hibátlanok, és mindenki mindenkivel "beszél".)
- A négy tábornok először mindenkinek elküldi a saját adatát, ekkor az alábbi ismeretekel rendelkeznek.
| Tábornok | Ismert adatok |
|---|---|
| #1 | (1, 2, x, 4) |
| #2 | (1, 2, y, 4) |
| #3 | (1, 2, 3, 4) |
| #4 | (1, 2, z, 4) |
- Ezután mindenki továbbküldi a saját ismereteit. A kapott sorokat mátrixban tároljuk
- [math]\#1 \rightarrow \begin{bmatrix} 1, 2, y, 4 \\ a, b, c, d \\ 1, 2, z, 4 \end{bmatrix}[/math] [math]\#2 \rightarrow \begin{bmatrix} 1, 2, x, 4 \\ e, f, g, h \\ 1, 2, z, 4 \end{bmatrix}[/math] [math]\#4 \rightarrow \begin{bmatrix} 1, 2, x, 4 \\ 1, 2, y, 4 \\ i, j, k, l \end{bmatrix}[/math]
- Az a..l betűk azért jelennek meg, mert a bizánci típusú ekkor is helytelen adatokat küld
- Végül mindenki többségi (2v1) szavazással eldönti, hogy a #3-tól jött hamis információ
- 4. Egy valós idejű mennyiség számítógépbeli képének pontossági intervalluma 2 msec. Azt szeretnénk, hogy a felhasználás helyén erről a mennyiségről mindig legyen kellően pontos képünk. Milyen gyakran kell frissíteni ezt a képet, ha az információ továbbítás a felhasználás helyére a legkedvezőtlenebb esetben 1,2 msec időt vesz igénybe (2 pont)? Mikor fázis-érzékeny egy periodikisan frissített valós idejű kép (1 pont)?
- Akkor lesz fázisérzékeny, ha a frissítés+utaztatás nagyobb, mint a pontosság
- A frissítésre hagyható maximum idő a pontosság-utaztatás, azaz most 0,8

- 5. A TTA architektúrában hogyan valósul meg a szinkronizáció, ha a csomópont eseményvezérelt működésű (3 pont)?
- Számláló típusú szemaforra lesz szükségünk.
- Amikor belekezdünk egy írásba, inkrementáljuk
- Amikor készen vagyunk, akkor is inkrementálunk
- Ennek a következménye: ha páratlan a szemafor, valaki éppen ír, ha páros, de nagyobb, akkor új adatot tudunk olvasni
- 6. Milyen eszközzel tudunk időt viszonylag pontosan mérni (1 pont)? Hogyan függ az időmérés ponossága az alkalmazott elektronikus számláló tartalmától, ill. az óragenerátor frekvencia pontosságától (1 pont)? Hogyan mérünk kis időtartamokat (2 pont)?
- A kísérő szövegeket nem sikerült leírni, de ezt az ábrát várja

- 7. Egy komplex technológiai folyamat állapotváltozóit 200 érzékelővel folyamatosan mérjük. A jeleket önállóan kommunikáló mikroprocesszoros egységek fogadják é dolgozzák fel. 10 ilyen egység van, mindegyik 20 érzékelőt szolgál ki. Ha mért jelek átlépnek egy határértéket, akkor a diszpécser számítógépet 100 msec-en belül értesíteni kell. Az ilyenkor küldendő üzenet minden állapotváltozó esetében 1 byte hosszúságú, a kommunikációs overhead 42 bit. A kommunikációs csatorna sávszélessége 100000 bit/sec. Vizsgálja meg, hogy eseményvezérelt működési módot választva hány állapotváltozó határérték túllépését tudja a rendszer időben jelezni a diszpécser központnak (3 pont)! Vizsgájla meg, hogy idővezérelt működésű módot választva milyen mértékű terhelést jelent a kommunikációs csatornán az az eset, amikor valamennyi állapotváltozó átlépi a határértéket (3 pont)!
- Hiba a bélyegkép létrehozásakor: Nem lehet a bélyegképet a célhelyre menteniA szakasz még csonk. Segíts a szerkesztésében. Ha nem tudod, hogy állj neki, olvasd el a tutorialt.
- 8. Mi a különbség a sporadikus és az aperiodikus taszkok között (2 pont)?
- Sporadikus: nem periodikus, de két kérés között legalább T idő eltelik
- Aperiodikus: nem periodikus, akármennyi érkezhet belőle
- 9. Mi a prcesszor-igény módszer lényege? Hogyan alkalmazzuk, ha a határidő kisebb, mint a periódusidő? (2 pont) Hasonlítsa össze a DM, az RM és az EDF algoritmusokat proceszor-igény szempontjából! (2 pont)
- Hiba a bélyegkép létrehozásakor: Nem lehet a bélyegképet a célhelyre menteniA szakasz még csonk. Segíts a szerkesztésében. Ha nem tudod, hogy állj neki, olvasd el a tutorialt.
- 10. inicializáláskor mekkora értékre kell beállítani azt a számláló szemafort, amely 10 taszk, és 5 egyenértékű erőforrás mőködését szinkronizálja (2 pont)?
- 5, mert a szemaforokat az erőforrások kezelésére hozzuk létre